Basic System Architecture
SAFE DIP can be organized into the following main subsystems:
| Subsystem | Purpose |
|---|---|
| Processing Module | Controls the logic of the system and coordinates sensors, motors, and the electromagnet. |
| Sensing Module | Detects part position, system status, or movement limits. |
| Movement Module | Controls horizontal and vertical motion. |
| Electromagnetic End-Effector | Picks up and releases metallic parts. |
| Power Distribution Module | Supplies power to motors, controller, sensors, and the electromagnet. |
| Communication Module | Allows the system to send or receive information from a computer or interface. |
| Emergency Stop Module | Provides a safety shutdown method during abnormal operation. |
Electromagnetic Pickup Concept
Instead of using a claw, SAFE DIP is planned to use an electromagnet to pick up metallic components. When the electromagnet is energized, it creates a magnetic field that attracts and holds the metal part. When the part reaches the output position, the electromagnet can be turned off to release it.
This approach is useful for the project because:
- The target objects are metallic.
- The pickup mechanism has fewer moving parts than a claw.
- The system may be easier to control mechanically.
- The end-effector can be compact.
- It matches the safety goal of reducing direct human contact with hot materials.
This part of the design is still under investigation and may change as testing continues.
Project Goals
The main goals of SAFE DIP are:
- Improve safety by reducing manual handling near hot wax.
- Automate the load-dip-unload process.
- Use an electromagnet to pick up metallic parts.
- Control vertical dipping depth.
- Move the part between input, wax bath, and output positions.
- Include emergency stop functionality.
- Keep the design modular and suitable for a Senior Design prototype.
- Maintain a low-cost design compared to industrial robotic systems.
Current Development Status
SAFE DIP is currently in the proposal and investigation stage. The team is defining the system structure, researching components, and developing the website documentation.
Current focus areas include:
- Project motivation and problem definition.
- System architecture.
- Electromagnet feasibility.
- Motion system concept.
- Safety requirements.
- Website structure and documentation.
- Future testing and validation plan.
As the project develops, this website will be updated with design changes, diagrams, test results, photos, and final documentation.
Progress Page Draft
Phase 1: Concept Development
The team identified the safety problem related to manual hot-dipping processes and proposed an automated pick-and-place solution.
Phase 2: Initial System Architecture
The project was divided into major subsystems: sensing, processing, motion, end-effector, communication, power distribution, and emergency stop.
Phase 3: End-Effector Direction
The project direction changed from a mechanical claw concept to an electromagnetic pickup concept for metallic tools or parts.
Phase 4: Research and Proposal Development
The team is currently researching the feasibility, safety considerations, and technical requirements needed to complete the proposal.
Phase 5: Future Work
Future updates may include CAD models, wiring diagrams, control logic, component selection, test results, and final prototype documentation.
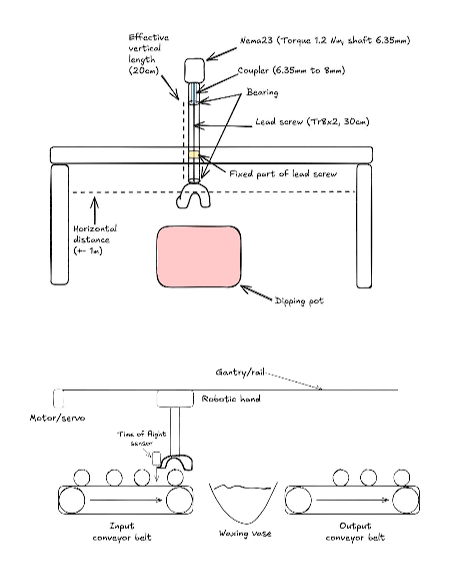
Block Diagram
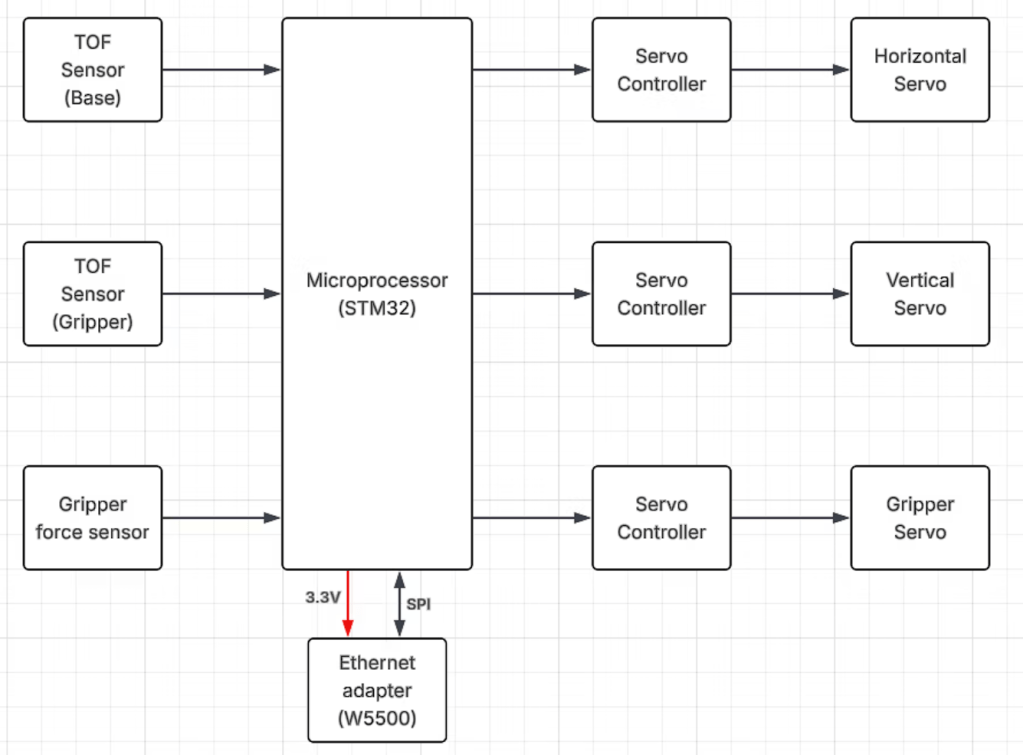
Project first drafts